Map matching based on gravity gradients could provide a navigation system for the growing number of autonomous underwater vehicles, which spend much of their time cut off from satellite signals, and for future autonomous shipping, which will require navigation systems resilient to the loss of satellite signals.
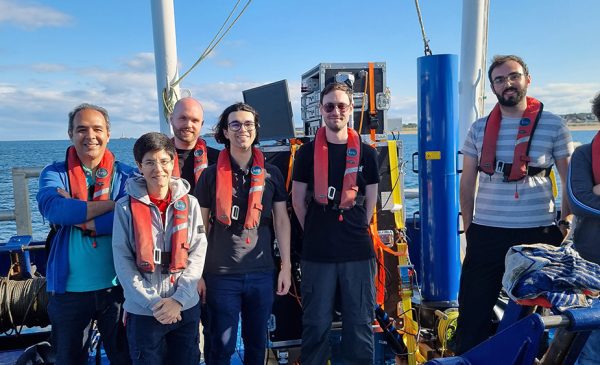
We are aiming for a world first in establishing the potential and limitations of magnetometry, gravity and gravity-gradient map matching for the location of trains. This will be a test case on a roadmap towards map-matching navigation on general mobile platforms. Benefitting from access to a four-mile railway track, train and carriages provided by Birmingham and access to the General Lighthouse Authorities’ vessel for maritime trials, we will establish critical environmental parameters and concept of operations for applications in different environments.
We will drive research into optimal hybrid sensors, and investigate the benefits of multi-sensor devices and sensors on inertial platforms.